(NEC;TSE:6701)开发了机器人人工智能技术,能够精确地处理无组织和无序放置的物品。通过预测障碍隐藏的区域和机器人行动的结果,这种技术使机器人有可能完成以前人工完成的任务,从而有助于提高生产力和改进工作方式。
背景
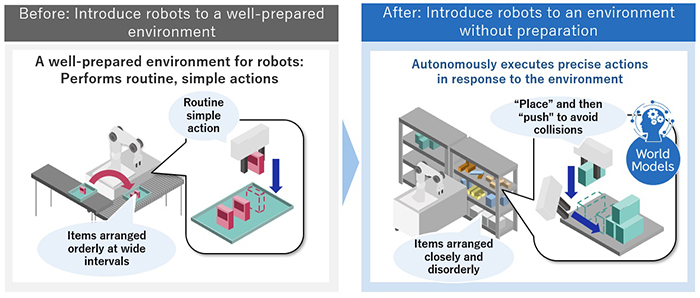
近年来,由于劳动力短缺等因素,物流仓库和工厂越来越需要通过引进机器人和大型设备实现自动化。然而,现有的机器人技术很难正确地识别物体和障碍被无序放置的环境,这就需要准备一个环境,以便机器人能够轻松地完成任务。因此,机器人的引入只限于简单的日常任务。
这项技术的特点
NEC开发了机器人人工智能技术,包括基于"世界模型"(*)的两种技术----"时空预测"和"机器人运动生成",前者根据相机数据精确预测工作环境和其自身行动的结果,后者根据这些预测自动生成最佳和精确的行动。根据NEC的研究,这是世界上第一个应用于机器人操作的同类技术。
 大视野 世界机器人模型的应用
大视野 世界机器人模型的应用
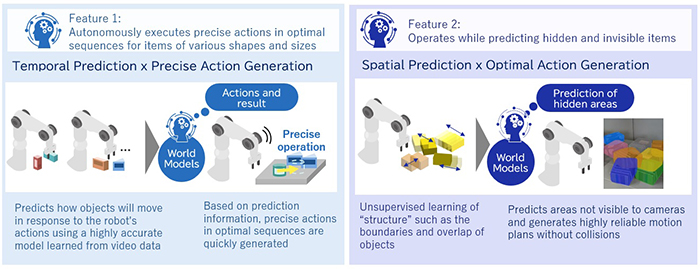
1.在最优序列中自主执行各种形状和尺寸项目的精确操作
在工作地点手动执行的对象处理是通过各种操作组合执行的。例如,在包装物品时,人们可以立即执行精确的组合动作,例如"放置然后推物品",而不会击中其他物品或障碍物。然而,在使用传统技术的机器人控制中,"推"和"拉"等动作比"拾起"和"位置"等动作更难以精确地执行。"这是因为动作或形状上的微小差异极大地影响了物体对动作的反应。此外,随着被认为行动的数量和类型的增加,行动的组合和顺序变得更加复杂,使实时规划成为一项挑战。
这项技术利用世界模型从摄像机数据中准确预测机器人在各种形状物体上的动作结果,使机器人能够执行精确的动作,如"推"和"拉"。此外,机器人可以根据工作环境以实时速度生成适当的动作序列,从而自主和即时地执行多种动作组合,如"放置和推推"和"拉和拾起"。
2.操作时预测隐藏和隐形项目
在工作环境中,多个项目被紧密排列或杂乱的堆积,人们自然而然地预测隐藏的区域,并相应地行动,如拾起物品,同时避免干扰隐藏的物体。然而,传统的机器人识别技术难以实际使用,因为它需要准备和学习大量显示隐藏对象状态的教学数据,以便预测隐藏区域。
这项新技术使无监督学习能够不需要通过应用世界模型标记,并能够有效地学习隐藏对象形状的预测模型。这使机器人能够从相机数据中准确预测工作环境,并自动产生不与其他物体或障碍物碰撞的最佳动作。
 大视野 技术特点
大视野 技术特点
未来发展
到2024年底,国家竞争委员会将在物流仓库和大部分人工完成的其他地点测试这一技术。NEC将通过促进社会在非常需要自动化的各个行业实施这一技术,为提高生产力和工作方式改革作出贡献。
***
- (*)
技术,使机器人能够预测在现实世界中,由于某一特定的行动将会发生什么,而不是在现实中尝试它。近年来,这一直是自主控制的关键技术.
上一篇我们送上的文章是
环保休闲休闲车提示:环保休闲车太阳能电池板、节能电池等 , _!在下一篇继续做详细介绍,如需了解更多,请持续关注。
本文由
日本NEC锂电池中国营销中心于2024-12-24 17:11:49 整理发布。
转载请注明出处.

